Animation
Cowbot Jump
Software:
About:
This asset belongs to the “Cowbots” project.
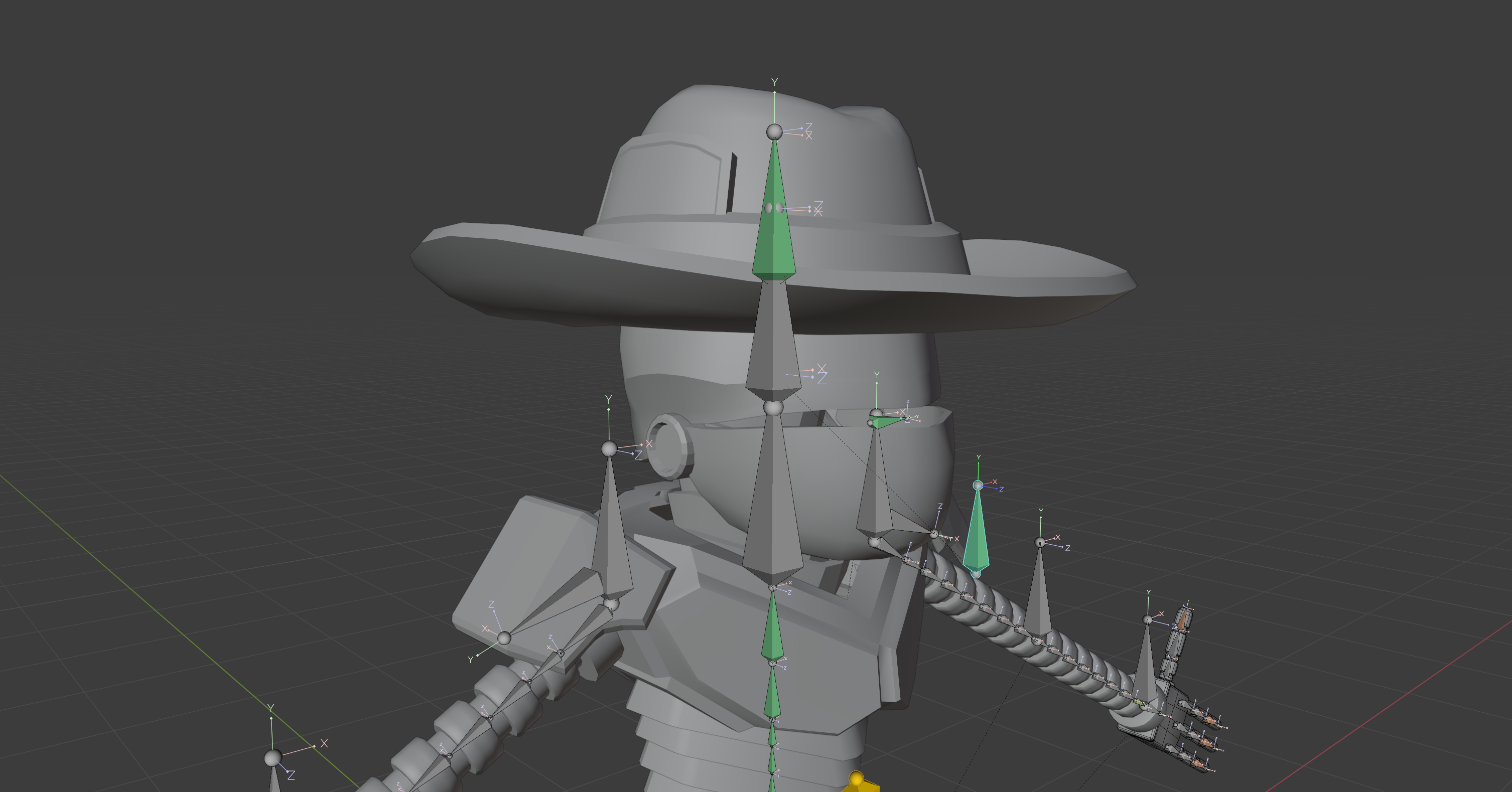
I brought this robot to life by rigging it and animating it.
I rigged this model so that it was possible to control every piece of it. I applied constraints to the spine bones so that they all react at the same time; I applied constrains to the wheel and handgun bones to make their rotation easier; I applied constraints to the arms bones to make them easy to animate wobbling if necessary.
Credits:
Rigging and Animation: Jéssica Carriço (me)
Character concept: Illka Raunio
3D modelling: Jacob Van Damme
Textures: Takaya Tanaka

